Compatible with Multiple Metal Materials
Suitable for welding carbon steel, stainless steel, and other materials.
Deep Penetration Welding
For carbon steel corner joints within 8 mm, single-side welding with double-side forming can be achieved.
Optional Welding Processes
Multiple welding processes are available, including
multi-layer and multi-pass welding.
The Laser Tracking System can be added as an optional feature.
Multiple Seam Tracking Options
Optional arc sensing tracking and laser seam tracking methods are available.
Vorteile
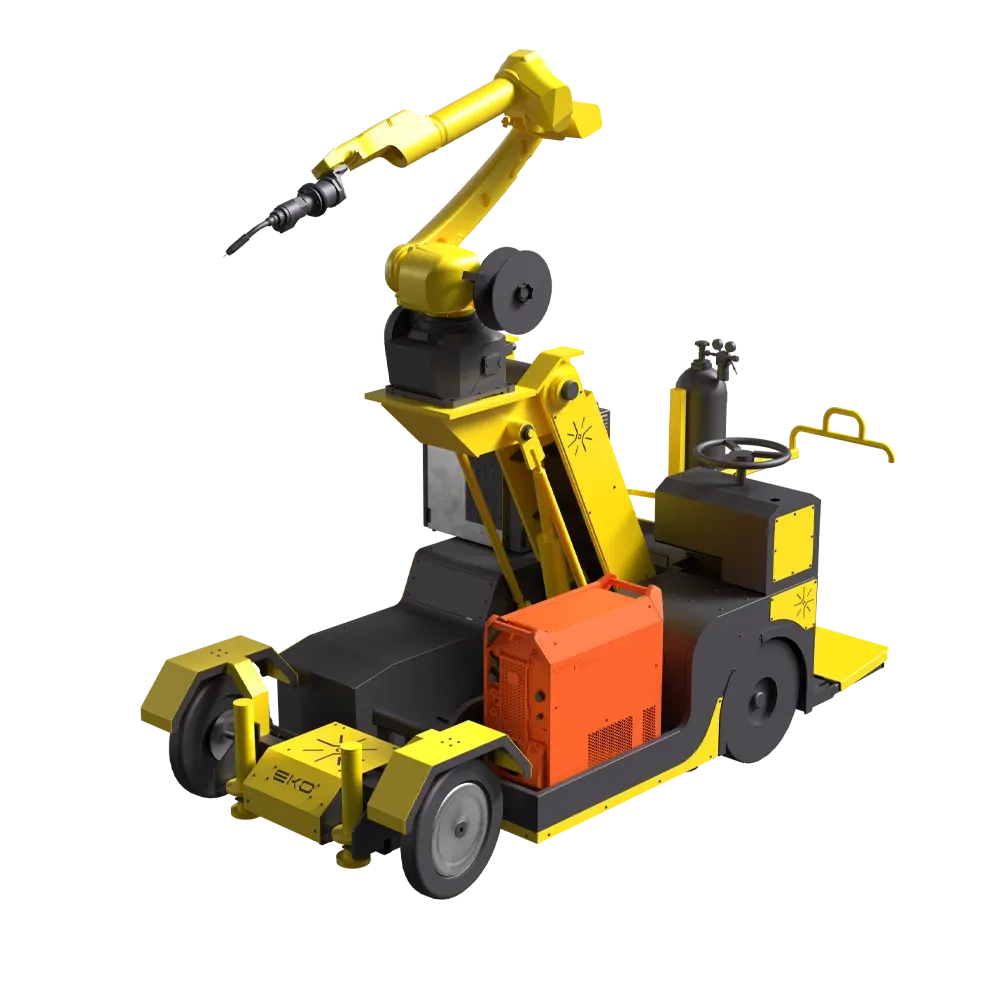
- Dank der selbstfahrenden Funktion wird der Bedarf an erfahrenen Schweißern reduziert.
- Beim robotergestützten Schweißen großer Strukturbauteile entfällt die Notwendigkeit von Vorrichtungen.
- Werkstücke können frei positioniert werden. Dadurch werden eine hohe Schweißkonsistenz, gleichmäßige Schweißnähte und fehlende Schweißstellen durch manuelle Prozesse vermieden.
- Das System kann mit mehreren Schweißwagen arbeiten und sorgt für eine höhere Effizienz.
Einsatzbereiche
Entwickelt für das Schweißen mittlerer und großer Strukturbauteile mit kleinen Losgrößen und hoher Variantenvielfalt.
Arbeitsweise
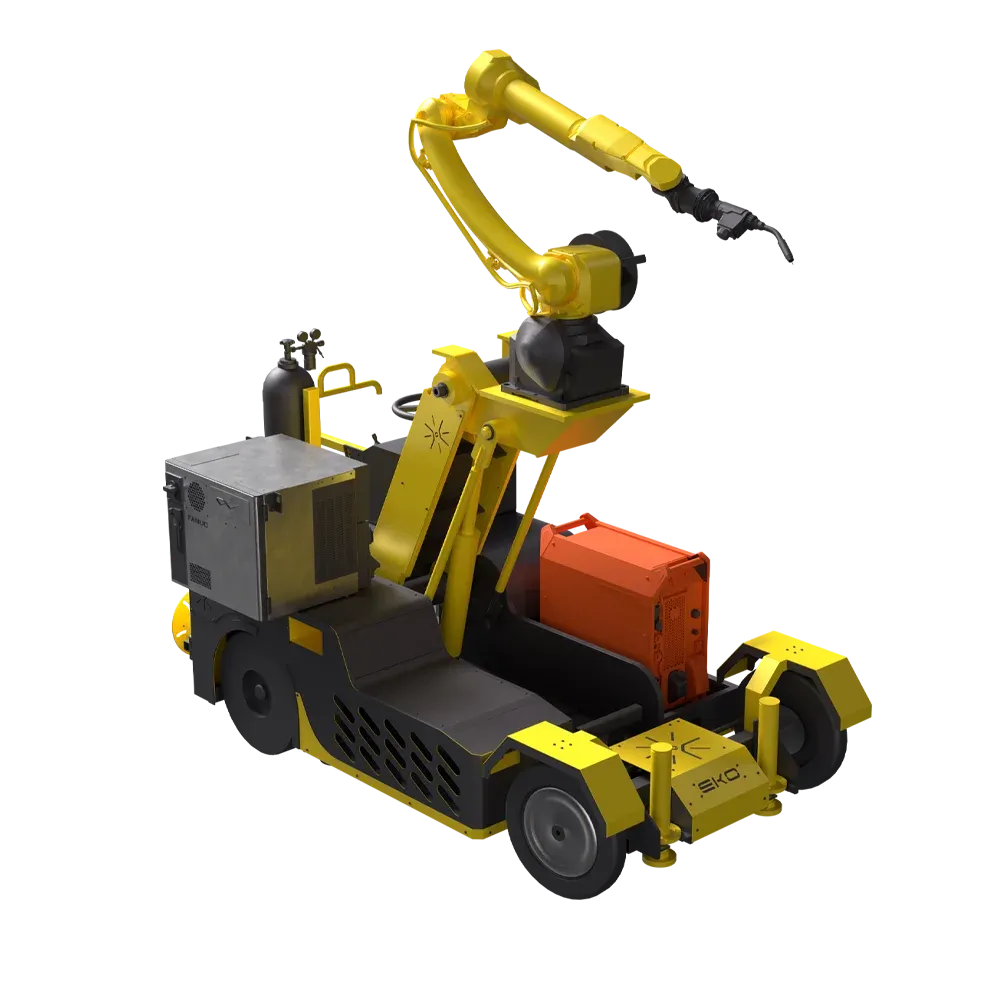
- Der Schweißwagen wird zum Werkstück gebracht und die Schweißarbeiten werden vor Ort durchgeführt. Bei ähnlichen Schweißnähten können gespeicherte Programme mit kleinen Positionskorrekturen wiederverwendet werden.
- Während des Schweißvorgangs wird die Position mithilfe der Lichtbogen-Tracking-Technologie in Echtzeit korrigiert.
- Bei der Serienfertigung von Standardteilen kann der mobile Schweißroboter mithilfe von Berührungserkennung und Laserpositionierung Serien-Schweißprozesse ausführen.
Allgemeine Anwendungsplattform
- Mobiles Schneiden
- Mobiles Schleifen
Geeignete Ausrüstung
- Umweltschutzausrüstung
- Druckbehälterausrüstung
- Energiespeichercontainer
- Baumaschinen
- Container
- Große Industrieventilatoren
- Große Stahlkonstruktionsausrüstung


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}