Compatible with Multiple Metal Materials
Suitable for welding carbon steel, stainless steel, and other materials.
Deep Penetration Welding
For carbon steel corner joints within 8 mm, single-side welding with double-side forming can be achieved.
Optional Welding Processes
Multiple welding processes are available, including
multi-layer and multi-pass welding.
The Laser Tracking System can be added as an optional feature.
Multiple Seam Tracking Options
Optional arc sensing tracking and laser seam tracking methods are available.
Advantages:
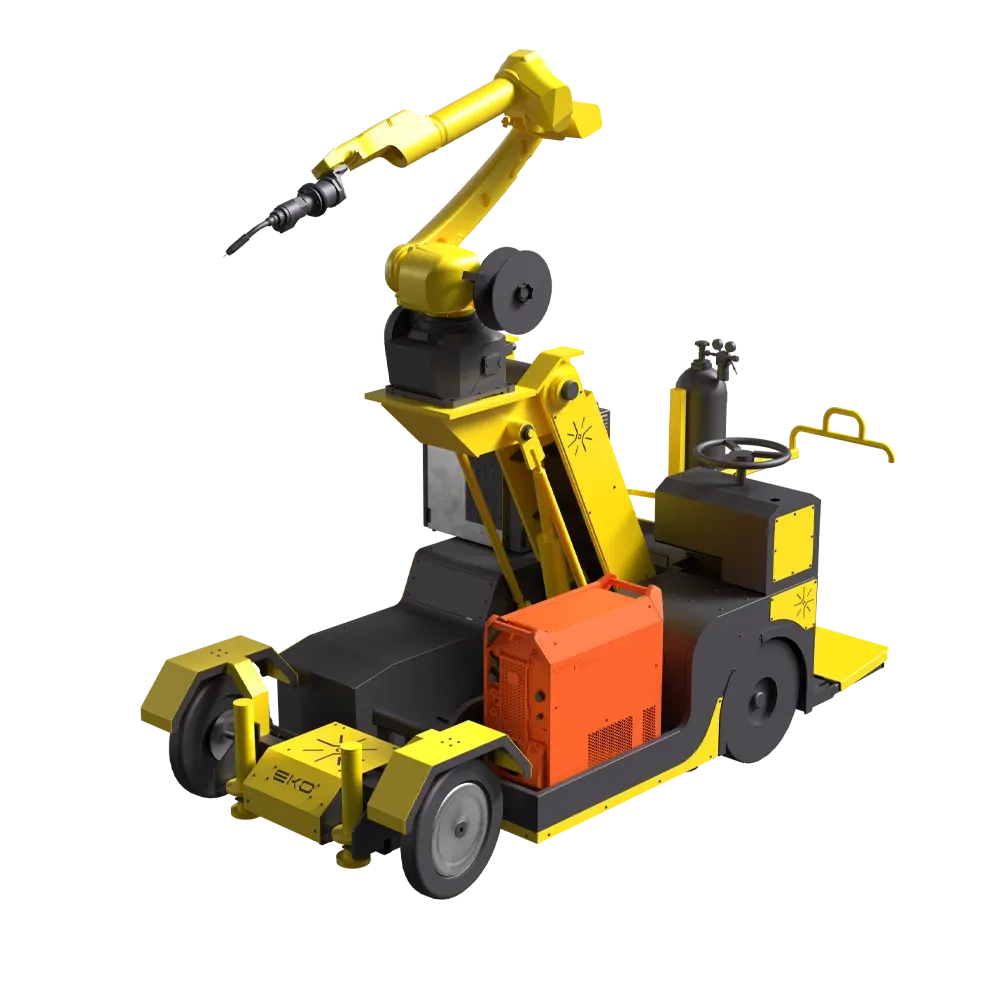
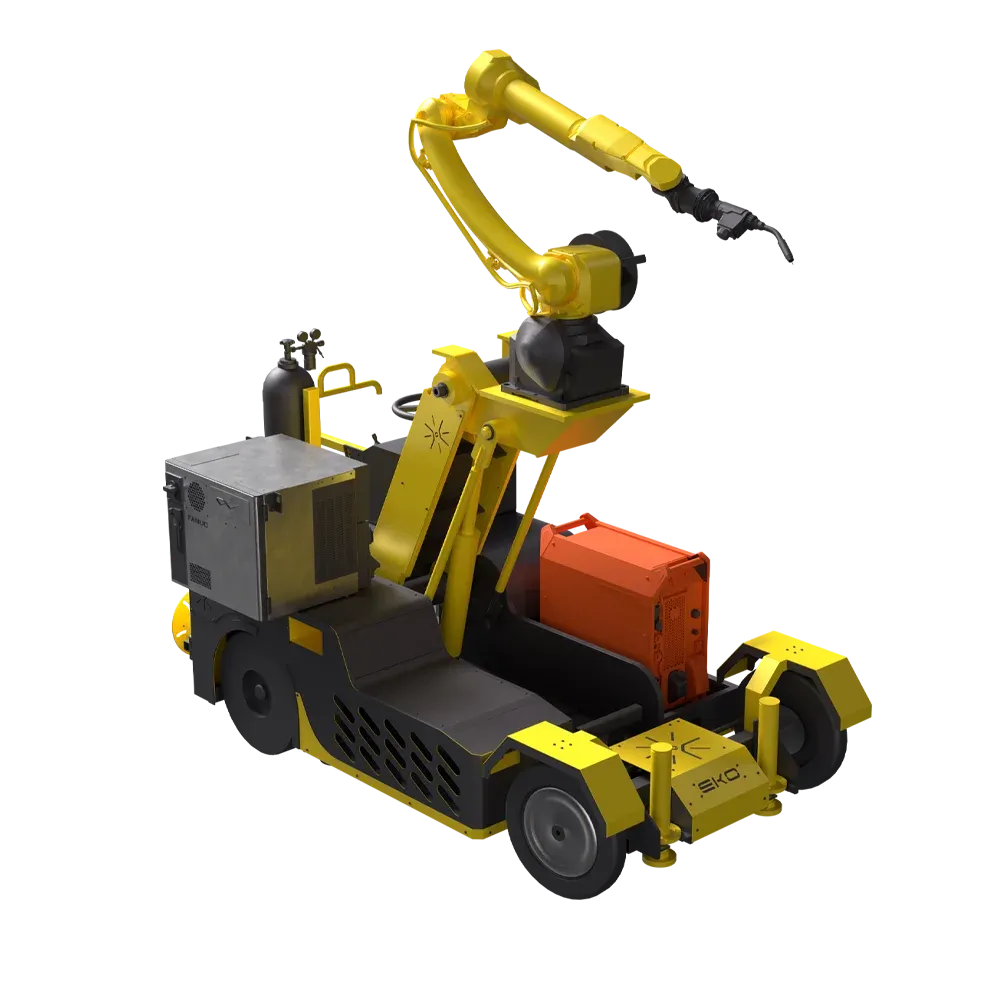
- Equippedwith a self-traveling function, eliminating the need for skilled welders.
- Eliminatesthe limitation of requiring fixtures when welding large structural components with robots.
- Workpiecescan be positioned freely, ensuring high welding consistency, attractive weld seams, and preventing missed welds caused by manual operation.
- Multipleweldingcarriages can work collaboratively, providing higher efficiency.
Solution for: Designed for welding medium- and large-sized structural components with small-batch, multi-variety production requirements.
Method:
- Movethe welding carriage to the workpiece location, enabling on-site welding. For similar weld seams,
stored programs can be reused with only minor position adjustments before welding directly.
- Duringthe welding process, the position is corrected in real time through arc tracking technology.
- Whenwelding standard parts in batches, the mobile welding robot can also complete batch welding operations through the robot’s touch sensing function and laser positioning system.
General Application Platform
Suitable for the Following Equipment
- Environmentalprotection equipment
- Pressurevessel equipment
- Energystorage containers
- Constructionmachinery
- Containers
- Largeindustrial fans
- Largesteel structure equipment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}