
-
Präzise Bewegungen dank robuster und ergonomischer Gehäusestruktur
-
Verwendung eines spielfreien Zykloidgetriebes
-
Vollständige Kompatibilität mit verschiedenen Robotersystemen wie ABB, Fanuc, Kuka und Yaskawa
-
Einfache Bedienung dank externer Servomotor- und SPS-Steuerung
-
Sonderanfertigung nach Kundenwunsch in gewünschten Maßen und Gewichten
2H-SERIE
Zwei-Stationen-Positionierer
Standardfunktionen
Technische Informationen
Technical Data | RP2H-0500 | RP2H-1000 | RP2H-3000 | RP2H-5000 | |
Max. Payload | kg | 500 | 1000 | 3000 | 5000 |
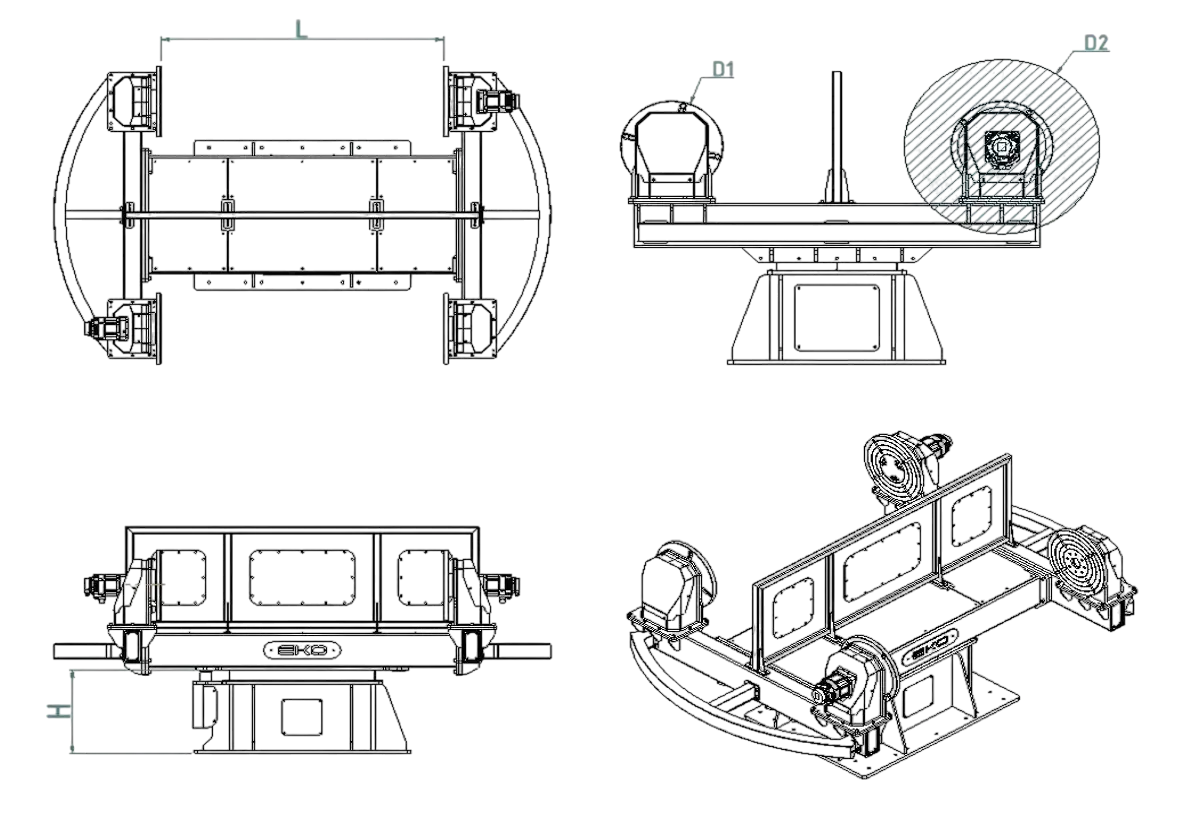
Height (H) | mm | 500 | 500 | 600 | 1000 |
Max. Length (L) | mm | 1000 | 1000 | 1000 | 1250 |
1250 | 1250 | 1250 | 1500 | ||
1500 | 1500 | 1500 | 2000 | ||
Tabla Diameter (D1) | mm | 300 | 400 | 750 | 1000 |
Max. Fixture Diameter (D2) | mm | 750 | 900 | 1000 | 1250 |
1000 | 1000 | 1250 | 1500 | ||
1250 | 1200 | - | 1750 | ||
Rotation Max. Speed | rpm | 20 | 10 | 7 | 5 |
Rotation Index Time | s/180° | 2 | 3,5 | 4,8 | 6,5 |
Center Of Gravity Radial Offset | mm | ≤ 200 | ≤ 200 | ≤ 150 | ≤ 150 |
Index Max. Speed | rpm | 8 | 8 | 6 | 6 |
Index Axis Time | s/180° | 6 | 6 | 6 | 5 |
Index Axis Time | ABB, FANUC, KUKA ,MITSUBISHI, PANASONIC, SCHNEIDER, SIEMENS, YASKAWA | ||||